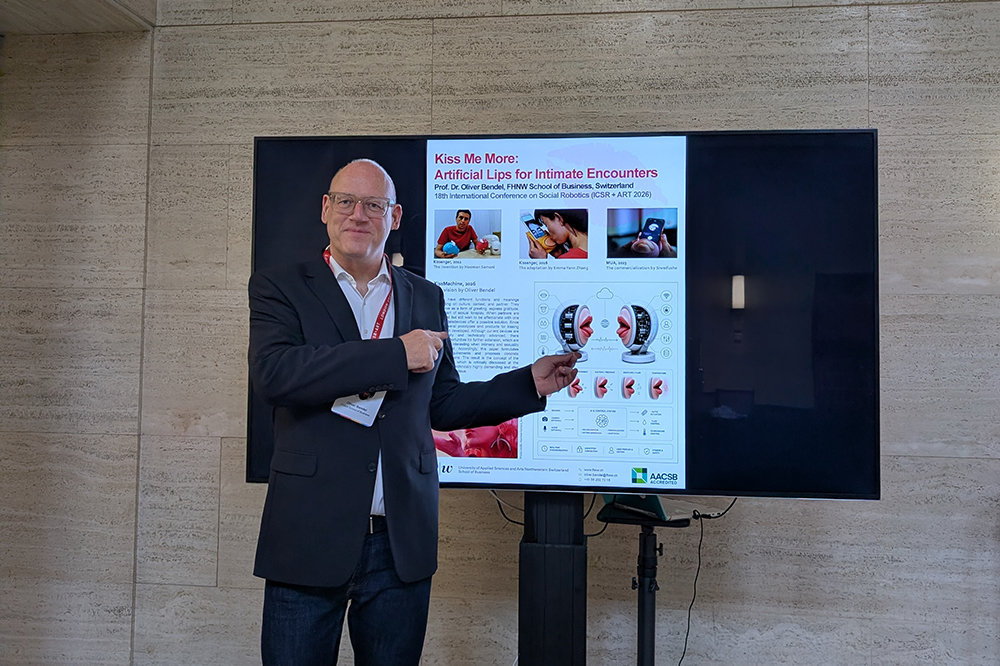
The 18th International Conference on Social Robotics (ICSR + Art 2026) is currently taking place in London from July 1–4, bringing together researchers, academics, and industry professionals from around the world to discuss the latest advances in social robotics. On the second day of the conference, researchers presented their latest work during the poster session, including Oliver Bendel’s paper “Kiss Me More: Artificial Lips for Intimate Encounters”. The title is a tribute to Doja Cat’s hit “Kiss Me More”, reflecting the paper’s focus on technology-mediated intimacy. The paper introduces the concept of the KissMachine, a next-generation telekissing device with artificial lips designed to enable more intimate remote interactions while addressing the technical, social, and ethical challenges of such technology. It also pays tribute to the Kissenger, invented by Hooman Samani in 2012, one of the pioneering telekissing systems that inspired subsequent research in this field. The exchange between Bendel and Samani highlighted both the evolution of telekissing technology over the past decade and the continuing interest in human-centered approaches to social robotics. Further information is available at icsr2026.uk.
Towards the KissMachine